发表时间: 2025/12/16 责任编辑: 浏览次数:4340
锅炉房作为工业生产、建筑供暖等场景的核心动力枢纽,其设备稳定运行直接关系到生产安全与能源供应效率。传统人工巡检模式已难以适配现代化锅炉房的管理需求,亟需通过智能化技术升级实现巡检提质增效。为了设备稳定安全运行,提高工作效率,减少人工巡查疲劳。需要对用户锅炉房安装一套轨道式巡检机器人。根据现场环境结合业主需求,安装1套智能轨道巡检机器人。用于全面覆盖锅炉房设备实时状态监测,铝合金轨道布置计划绕设备间一圈路径行走,轨道长度大约50米左右(具体根据现场实测长度)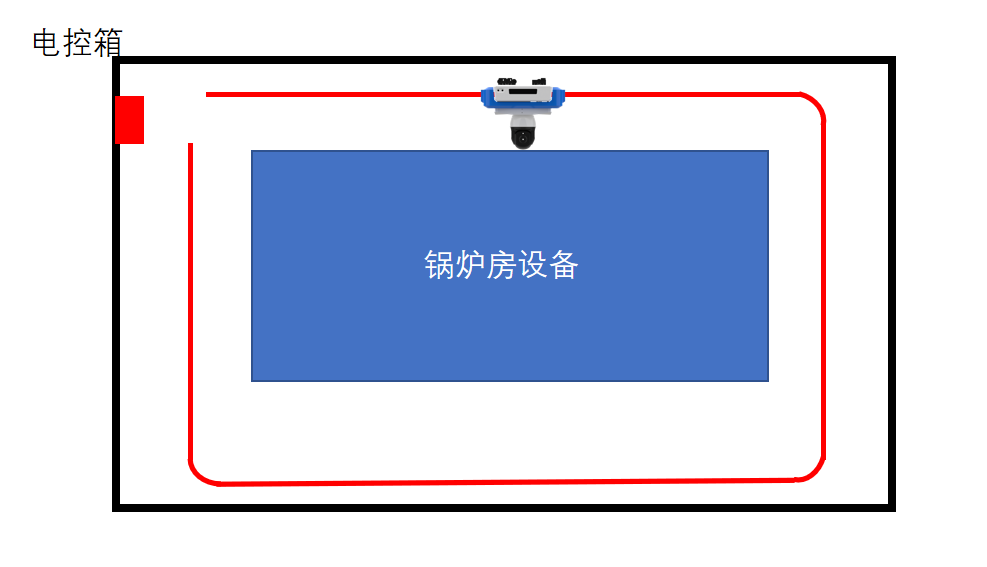 ,共1条。在顶上吊装支架进行轨道的吊装拼接,轨道安装在支架下方,机器人可通过轨道进行来回巡检,挂载各种前端功能性模块
,共1条。在顶上吊装支架进行轨道的吊装拼接,轨道安装在支架下方,机器人可通过轨道进行来回巡检,挂载各种前端功能性模块
人工巡检痛点:
安全风险高:锅炉房存在高温、高压、有毒有害气体、噪音超标等恶劣环境,人工巡检易发生烫伤、气体中毒、设备误触等安全事
巡检效率低:大型锅炉房设备密集、管线复杂,人工巡检需逐点记录数据、排查隐患,单轮巡检耗时久,且难以实现 24 小时不间断覆盖。
数据准确性差:人工巡检依赖经验判断,数据记录易出现遗漏、误差,且无法实时同步数据,导致隐患预警滞后。
人力成本高:需配置专职巡检人员,且需定期开展安全培训,长期人力投入成本较高;同时,高强度巡检工作易导致人员疲劳,进一步影响巡检质量。
项目预期目标
通过轨道机器人对实现对锅炉房内各设备温度的实时精准监测,通过搭载热成像测温摄像机以及烟雾报警器来预防室内明火以及烟雾报警,当检测到设备温度异常升高或者环境烟雾超标时,系统能立即触发报警并推送告警信息,最终达成锅炉房内设备状态的无人化、智能化值守,提升设备安全运行的保障能力,降低人工巡检的压力和漏检风险。大大提高了工厂的智能化程度和全方位监控的自动化水平,确保了设备安全可靠稳定运行 , 为企业的安全生产保驾护航。
方案核心目标:
安全升级:替代人工进入高危环境,消除巡检过程中的人身安全风险,实现 “无人化” 高危区域巡检。
效率提升:实现 24 小时不间断巡检,缩短单轮巡检时间,提升巡检频次,确保隐患早发现、早处理。
数据精准化:通过高精度传感器自动采集设备数据,实时上传至管理平台,确保数据真实、完整、可追溯。
成本优化:降低长期人力投入成本,减少因设备故障导致的停产损失,提升锅炉房整体运营性价比。
智能化管理:构建 “巡检 - 数据 - 分析 - 预警 - 处置” 闭环管理体系,为设备维护、运营决策提供数据支撑。
系统技术方案
益可达企业配电室智能巡检机器人是一款智能型可移动的数字式综合监测设备搭载系统,可以挂载音视频采集设备、影音播放设备、红外测温设备、自动化机电设备等,系统采用高性能嵌入式CPU 控制。全工业化元器件设计,系统运行可靠,功能齐全。
智能巡检机器人主要由控制中心、水平运动机构、轨道总成、升降运动机构以及搭载功能性设备等五大部分组成, 所搭载的各类摄像机、拾音器、红外探测设备在采集了相应的数据后,通过系统的数据传输通道(FM、WIFI、OFDM 等方式),将网络数字信号或模拟信号传输给监控中心的控制平台 ; 核心解码器支持TCP/IP 网络或RS485 串行通信模式直接控制,实现监控平台的在线控制功能。
智能巡检机器人系统组成
系统由集成系统(后台及外围设备)及智能巡检 轨道式机器人组成,而智能巡检 轨道式机器人主要由控制中心、水平直线运动机构、轨道总成、和摄像机等四大部分组成。
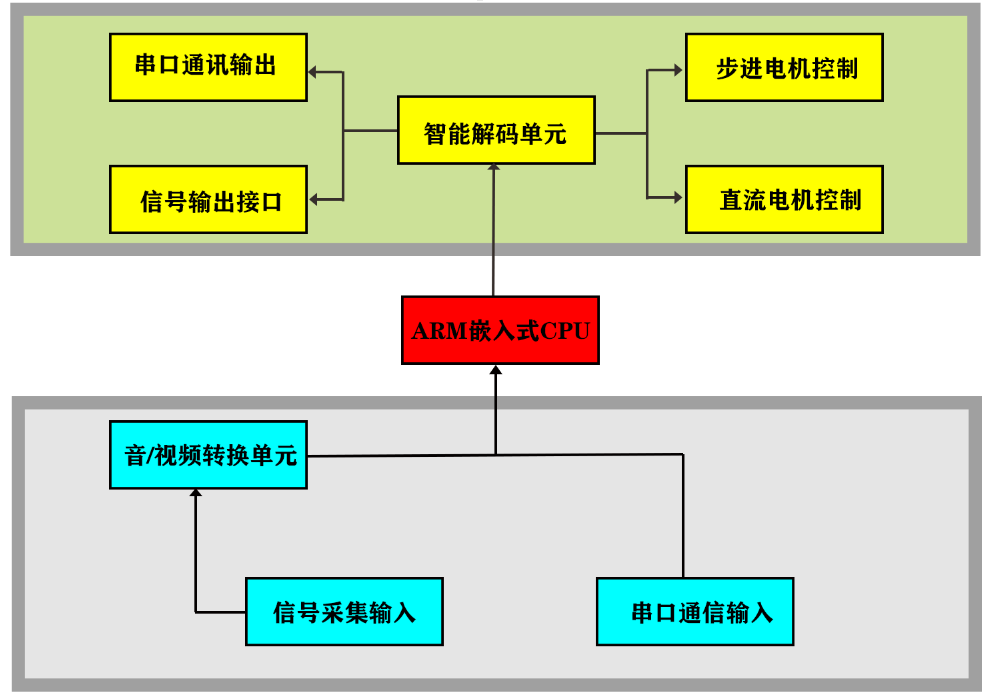
系统组成框图如图所示:
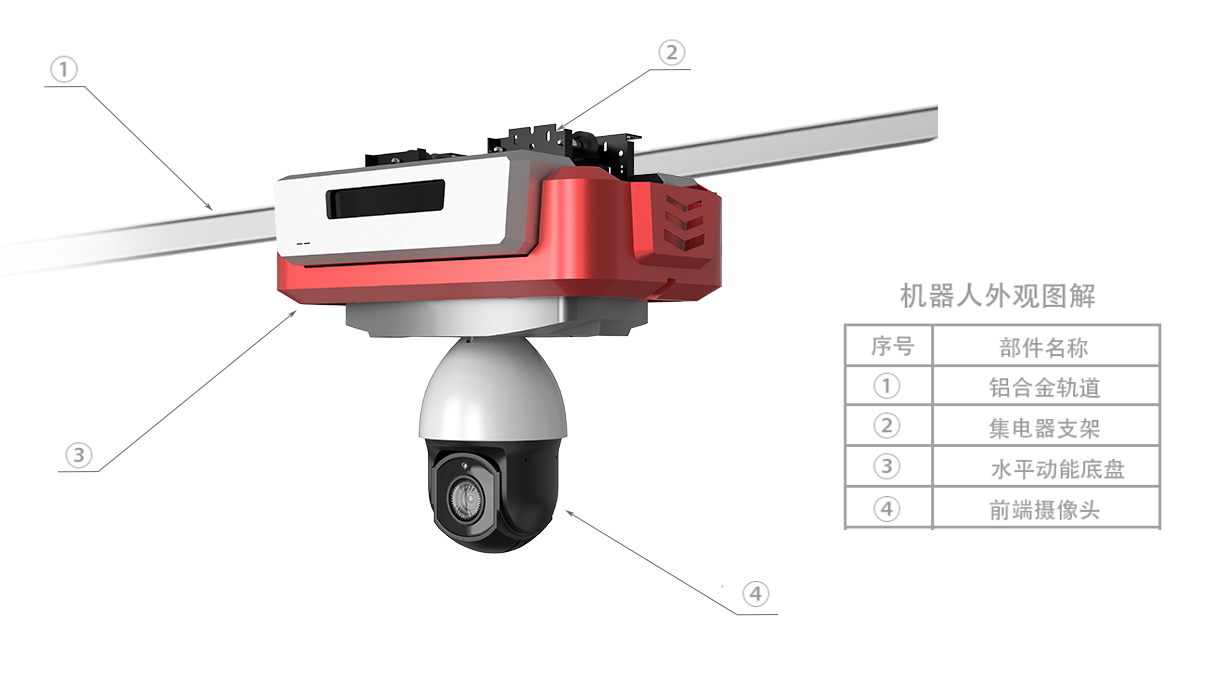
智能轨道巡检机器人主机由机器外壳、水平动能机构、轨道链接系统、通信供电系统和智能后台管理平台组成。巡检机器人前端搭载高清相机、红外热成像模块、路径规划导航模块等前端功能性设备,负责巡检区域内设备的数据采集及分析。
控制中心:是本系统的核心单元,由 ARM 嵌入式 CPU、智能解码单元、信号转换单元、串 口通信接 口、视/音频数据采集单元、信号输出接口等组成; 实现视频信号的采集、传输;串 口数据通讯、状态存储、程序智能等功能。
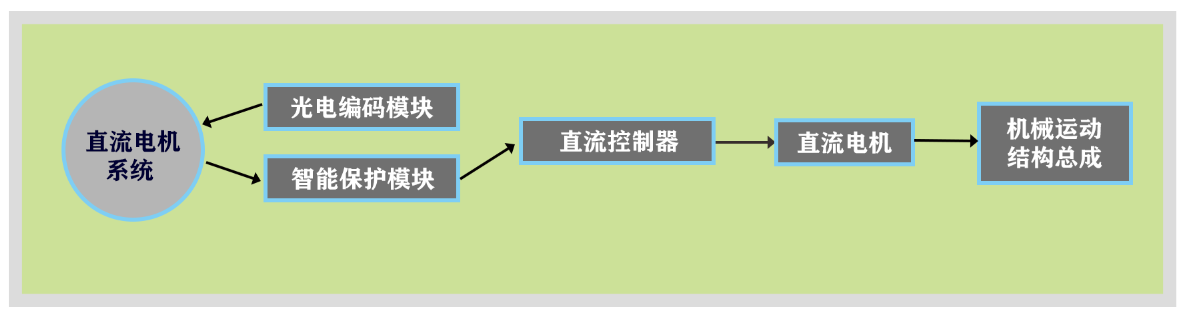
水平动能系统:
水平动能系统驱动电机采用高精度步进电机系统,传动机械结构紧凑合理,电路设计科学可靠,可实现水平方向高速移动;能够实现垂直方向S曲线加、减速控制;0~255个巡航点设定、 无人自动巡航及智能化多渠道报警模式,后端平台软件智能化控制等;水平方向重复定位精度±3mm.移动速度持协议扩展的64级等级运行速度,最高速度可达25米~60米/分钟;
步进电机型系统结构如图1所示:
前端探测子系统(部分):
系统根据需要可挂载各种型号摄像机,实现数字监控系统功能,同时系统可搭载红外探测,烟雾传感器、配合后台图像分析软件,可实现对检测现场环境的实时控制。
系统技术设计:
用先进的双 IP 控制模式,淘汰传统的485 串 口控制模式,支持网络数字化的智能轨道巡检机器人与监控球机的同步控制。采用一体式微波及内嵌供电技术,对电源、控制信号和视频信号分别传输, 具有传输延时低、运行可靠、图像稳定等特点,所有的功能均可在控制中心操作完成。水平动能系统驱动电机为步进电机型,机械结构紧凑合理,电路设计科学可靠,可实现水平高速移动;速度可调、S 曲线加减速控制;预置位、 自动巡航,智能化控制等功能;重复定位精度±3mm.移动速度持协议扩展的64 级等级运行速度,速度可调。轨道系统:用于承载机器人进行轨道行走,采用专用高强度铝合金预制轨道,具有强度高、稳定性好、防腐蚀、安装方便、美观等优点; 由轨道,电源、网络通信、视/音频信号通道,控制箱接 口,机械传动机构,轨道连接附件,套装安装附件组成;是实现轨道机运行轨迹的载体,可以实现轨道机水平方向运行、转弯变道、内置一体式微波信号及内嵌式供电、通讯传输等功能;运行平缓无卡顿;24 小时连续不间断运行,无需充电等待。供电线缆安装在轨道内部,实现了不间断供电,解决了因电池电量不足而导致机器人无法完成巡检任务的问题。同时线缆实现了控制信号、数据视频与机器人本体的有线连接,利用轨道作为信号通信通道,实现与系统后端智能AI平台的通讯功能,无需再额外安装有线通讯线路或无线通讯装置








