发表时间: 2025/12/09 责任编辑: 浏览次数:4968
一、效率提升目标
1. 实现大棚全区域24小时不间断巡检,巡检覆盖效率较传统人工提升80%以上,巡检周期缩短30-50%,告警响应≤30秒,误报率≤5%,远程复核闭环≤5分钟,夜间无人值守自动化处置≥80%。
2. 自动化巡检与水肥精准施用流程,减少人工投入成本50%以上,解放种植人员从重复性劳动。
二、监测精准目标
1. 精准监测温室大棚核心环境参数(温湿度、光照、CO₂浓度、土壤墒情等),围绕果蔬种植、育苗培育等生产需求,建立高稳定、可量化的环境控制与监测体系,确保大棚全生育期内保持精密、一致、可追溯的生长环境
2. 通过图像识别、多传感器融合分析技术,实现对大棚环境参数与作物长势(叶片状态、开花结果情况等)的实时感知、异常预警与闭环调控,保障作物生长稳定性。
三、管理优化目标
1. 构建数字化种植档案,自动记录巡检数据、水肥施用记录、异常处理结果,实现种植全流程可追溯。
2. 基于数据生成分析报告,为水肥调控、环境优化提供决策支撑,超限自动告警,保障作物生长稳定性。

益可达温室大棚智能巡检机器人是一款智能型可移动的数字式综合监测设备搭载系统,可以挂载音视频采集设备、影音播放设备、红外测温设备、自动化机电设备等,系统采用高性能嵌入式CPU 控制。全工业化元器件设计,系统运行可靠,功能齐全。
智能巡检机器人主要由控制中心、水平运动机构、升降运动机构、轨道总成以及搭载功能性设备等五大部分组成, 所搭载的各类摄像机、温湿度气体探测设备在采集了相应的数据后,通过系统的数据传输通道(FM、WIFI、OFDM 等方式),将网络数字信号或模拟信号传输给监控中心的控制平台 ; 核心解码器支持TCP/IP 网络
或RS485 串行通信模式直接控制,实现监控平台的在线控制功能
 。
。
2.1 巡检机器人系统组成
系统由集成系统(后台及外围设备)及智能巡检轨道式机器人组成,而智能巡检轨道式机器人主要由控制中心、水平动能系统、轨道总成、升降运动机构和红外模块摄像机等五大部分组成。
系统组成框图如图所示
: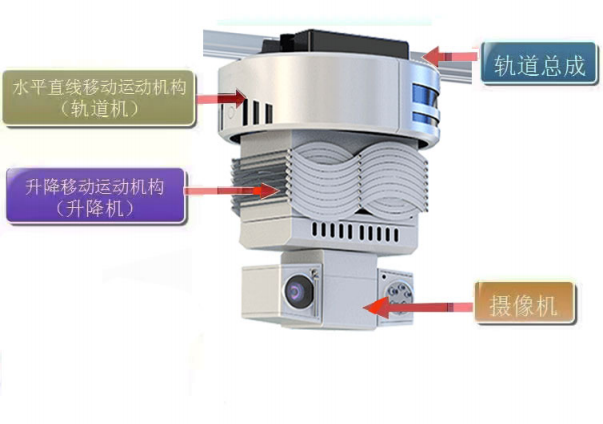
智能轨道巡检机器人主机由机器外壳、水平动能机构、轨道链接系统、通信供电系统和智能后台管理平台组成。巡检机器人前端搭载高清相机、红外热成像模块、路径规划导航模块等前端功能性设备.负责巡检区域内设备的数据采集及分析。
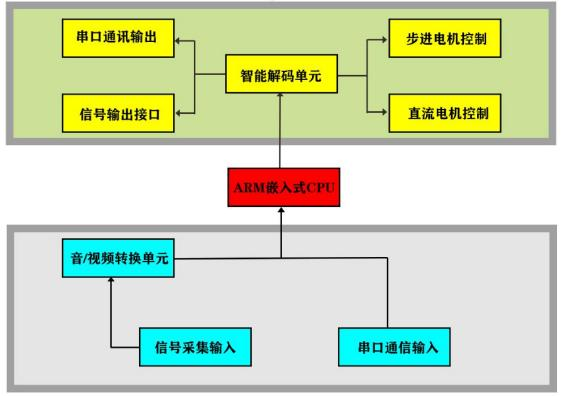
控制中心设计原理:
是本系统的核心单元,由 ARM 嵌入式 CPU、智能解码单元、信号转换单元、串 口通信接 口、视/音频数据采集单元、信号输出接口等组成; 实现视频信号的采集、传输;串 口数据通讯、状态存储、程序智能等功能。
控制中心技术原理如图
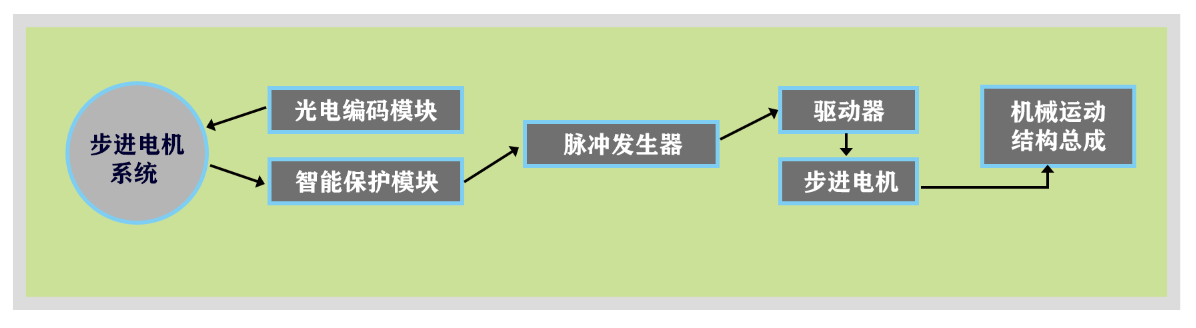
水平动能系统:
水平动能系统驱动电机采用高精度步进电机系统,水 平 机构采用高精度直流无刷电机系统;可实现水平左右移动;速度可调、S 曲线加、减速控制;0~255个巡航点设定、 无人自动巡航及智能化多渠道报警模式,后端平台软件智能化控制等。水平方向重复定位精度±3mm.移动速度持协议扩展的64级等级运行速度,最高速度可达25米~60米/分钟.
步进电机型系统结构如图1所示:
前端探测子系统(部分):
系统根据需要可挂载各种型号摄像机,实现数字监控系统功能,同时系统可搭载红外探测,温湿度传感器、气体传感器、雷达探测器,配合后台图像AI分析软件,可实现对检测现场环境的实时情况监测及预警。
可见光监控
高清摄像头,具有400 万像素,30 倍光学变焦,聚焦快速,准确。
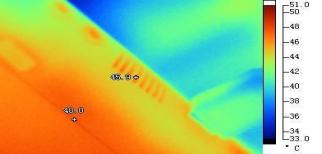
红外热像能够提前发现异常情况,避免演变为严重故障,杜绝财产损失或对人身安全构成潜在威胁。 红外热成像

红外热像能够提前发现异常情况,避免演变为严重故障,杜绝财产损失或对人身安全构成潜在威胁。
气体探测
可搭载十几种气体探测,环境探测,烟雾探测等传感器。

激光雷达
实时高数据速率高数据速率进行连续快速扫描。探测距离超过200米

自动巡检:自动巡检指巡检机器人能够按照预设规划路径、巡检内容进行自动巡检, 自动巡检的模式主要有:手动巡检、定时巡检等,各种模式支持互相切换。机器人搭载高清摄像机、红外热成像仪、等检测设备,按照既定的规则完成各处的设备进行可见光图像采集、红外测温巡检活动,并将巡检数据实时传输到后台管理系统中进行存储、展示
机器人自检包括机器人本体在开机时的自检和机器人在巡检过程中的实时自检。机器人在每次开机过程中均会进行自检,若发现部件异常,则给出异常指示,方便运维人员及时发现机器人故障,减少处理时间,提高解决故障的效率
本方案聚焦农业大棚高效种植需求,将智能巡检机器人与水肥一体化系统深度融合,通过“智能感知-精准决策-自动执行”闭环,解决传统大棚巡检效率低、水肥施用凭经验等痛点,实现种植过程的数字化、自动化与精细化管理

(二)多维度环境监测
机器人搭载搭载高清摄像头、红外热成像仪及温湿度、CO₂、土壤墒情(湿度/EC/pH)等多参数传感器,实时采集室内环境数据,数据误差控制在±5%以内。通过无线传输模块将数据同步至管理平台,当参数超出预设阈值时,立即触发声光报警,提醒工作人员及时调控。
(三)智能感知与识别
集成高清摄像头与AI图像算法识别作物叶片形态、病虫害早期迹象(识别率≥90%)、缺素症状,结合传感器数据监测环境温湿度、光照、气体浓度等关键参数。
四)数字化数据管理
构建云端管理平台,自动记录巡检数据、温室大棚可实现环境精准可控、作物健康可判、能耗持续优化、运营高效透明,生成可视化报表与趋势分析图。支持历史数据回溯与导出支撑科研与生产的标准化与高质量推进。

三、硬件配置方案
(一)巡检机器人本体
• 搭载高精度驱动电机,确保轨道移动平稳,最大移动速度20m/min,定位精度±3mm;
(二)感知监测模块(选配)
• 环境传感器:集成温湿度、CO₂、光照、烟雾等传感器,数据采样频率1次/分钟;
•土壤传感器:监测土壤墒情、EC值(养分浓度),精准反馈作物水肥需求;
• 视觉系统:400万像素高清摄像头,30倍光学变焦,1080P红外夜视成像,配合AI算法识别叶片状态、病虫害、作物长势。
(三)轨道
• 定制高强度铝合金轨道,适配室内温室大棚空间布局,承重能力≥50kg;
(四)智能管理平台终端
• 云端管理系统:支持电脑端、手机APP多终端登录,实时查看巡检数据、设备状态、水肥施用记录。
• 本地监控中心:配备工业级显示屏,集中展示全场监测情况,接收报警信息。
• 数据管理:自动存储历史数据,生成可视化报表与趋势分析图,支持数据导出.
• AI分析:基于深度学习算法,识别作物病虫害(早期识别率≥90%)、生
长胁迫,优化水肥决策;
(五) 水肥精准调控
1. 需求分析:AI系统结合巡检数据(土壤墒情、EC值、作物长势)与作物生长模型,判断当前水肥需求;
2. 方案生成:自动生成个性化水肥方案,明确灌溉量、肥料配比、施用时长,支持用户自定义调整;
3. 精准执行:管理平台下发指令至水肥一体化设备,通过分区控制实现不同区域、不同作物的精准供给,施用过程实时反馈至平台;
4. 闭环优化:水肥施用后,巡检机器人再次采集数据,平台对比分析效果,动态调整下一次水肥方案。

四、软件系统架构
(一)巡检机器人控制系统
实现巡检机器人移动控制、路径规划、设备自检与故障报警,支持远程操控与自动作业模式切换。
(二)AI智能分析系统
基于深度学习算法,持续优植物生长识别模型,实现环境精准可控、作物健康可判.
(三)数据管理与展示系统
具备数据存储、统计分析、报表生成、报警推送等功能,界面简洁直观,操作便捷。

五、预期效益
• 节本增效:节水30%-50%、节肥20%-40%,人工成本降低60%以上,巡检周期大幅缩短,实现夜间无人值守。
• 提质增产:作物生长胁迫事件减少≥60%,生长周期缩短5%-15%,产量提升10%-25%,作物一致性与合格率显著提升。
• 风险可控:环境监测精准化与作物风险及时化,病虫害早期识别率≥90%,环境异常实时预警,种植过程全数据可追溯,支撑科研与生产标准化推进。








