

 全球服务
全球服务益可达巡检机器人上岗淮矿选煤厂
发表时间:2023-06-12 责任编辑:益可达
对于煤矿洗煤工程而言,供配电系统是十分关键的一个组成部分,变电所是否安全稳定运行关乎洗煤厂工作能否顺利进行。因为洗煤厂内存在较多的负荷种类和广泛的分布区域,其地质条件和工作环境都较为复杂,一些不稳定要素存在,往往出现停送电时间长等现象,这严重威胁洗煤厂的安全生产。此次淮南矿业旗下三大洗煤厂的配电室为实现无人化看守,智慧化巡视,准备使用智能视频移动摄像机进行配电室的巡检视察。

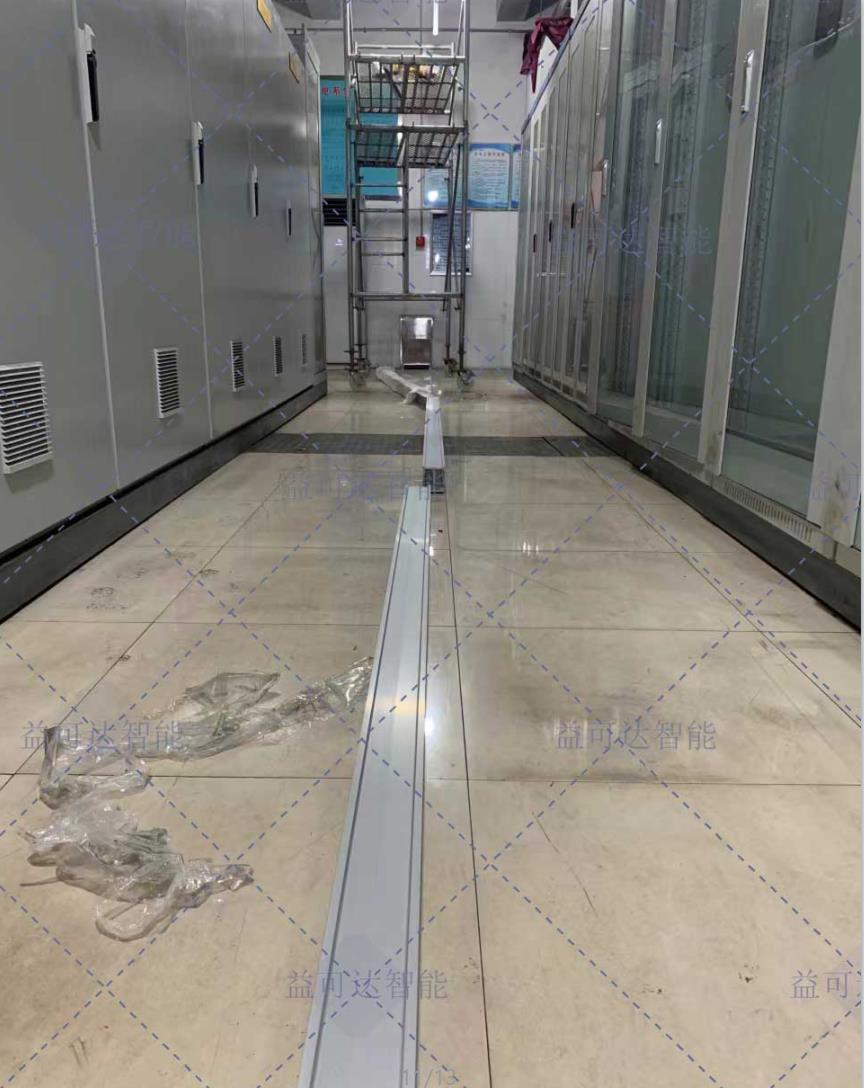
为了设备稳定安全运行,提高工作效率,减少人工巡查疲劳。需要对张集、谢桥、潘集高压配电室安装轨道式巡检机器人。安装3套智能轨道巡检机器人。用于全面覆盖配电室设备实时状态监测,同时搭载可见光红外摄像机,用于监测设备温度实时状态。机柜为对向两排分布 ,计划在机柜中间布置一条直线型轨道(如下图) ,轨道长度(具体根据现场实测长度),共3条。在顶上吊装支架进行轨道的吊装拼接,轨道安装在支架下方,机器人可通过轨道进行来回巡检,挂载的摄像头实时录像。
自动巡检:自动巡检指巡检机器人能够按照预设规划路径、巡检内容进行自动巡检,自动巡检的模式主要有:手动巡检、定时巡检等,各种模式支持互相切换。机器人搭载高清摄像机、红外热成像仪、等检测设备,按照既定的规则完成各处的设备进行可见光图像采集、红外测温巡检活动,并将巡检数据实时传输到后台管理系统中进行存储、展示。
人工遥控巡检:除机器人自动巡检外,运维人员还可以通过人工手动的方式控制机器人进行巡检。该应用模式适用于运维人员以及管理单位需要对某类设备的状态进行锁定与监测,尤其对于在设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间使用后台系统界面的预置点位面板,操控机器人快速到达异常设备位置,及时对异常设备进行查看并核实报警信息,以便迅速制定处理策略。
机器自检:机器人自检包括机器人本体在开机时的自检和机器人在巡检过程中的实时自检。机器人在每次开机过程中均会进行自检,若发现部件异常,则给出异常指示,方便运维人员及时发现机器人故障,减少处理时间,提高解决故障的效率。
巡检定位:挂轨机器人沿轨道行驶,通过码盘进行测距和定位,同时通过在轨道上预先设置预置点位进行定位巡检。通过齿轮齿条进行校准,实现精确定点停靠。无需在轨道上安装定位标签,避免时间长标签损坏导致定位不准。预置位保存在主板内部,自动根据设定点位进行路线巡检。定位误差不超过±3mm.
数据报表:后台管理系统能够自动存储前端摄像机拍摄到的图片以及预设巡检点数据的查询,并生成相关报表。记录准确且完整,方便存储、汇报、决策和作归档处理等。
视频巡检:根据设备巡视内容及要求,对厂区巡检点位巡视进行梳理,形成覆盖要求。根据现场实际情况,通过配置红外高清双视在线测温系统、高清摄像机等设备,实现机器人巡检。机器人配备可见光摄像机、红外热成像仪等检测设备,并能将所采集的视频上传至监控后台。巡检内容可包含:现场人员情况以及配电室设备的外观设备。
通过搭载热成像测温功能热成像摄像头具有1个 RJ45网络接口、2路报警输入、2路报警输出、1路音频输入、1路音频输出、1个BNC模拟视频输出接口、1个HDCVI 输出接口、1个RS485接口。样机采用DC12V适配器供电。云台定位准确度检验:≤0.01°动态范围检验:可见光视频:≥90dB,信噪比检验:可见光视频:≥62dB,最低照度检验:移动侦测功能检验:当可见光视频图像设定的侦测区域内有目标移动时,可在客户端给出报警提示、联动报警输出并发送email、联动录像及联动抓拍。
随着智能化工业的迅速发展,将机器人技术应用与设备故障检测融合,通过巡检机器人实现对电力、煤矿制造等场景的无人化运维检测,这已经成为必然的发展趋势。巡检机器人可以实现高频次、大范围、无遗漏的执行巡检任务,避免常规人工巡检可能出现的人员疲劳效率低、误操作导致安全事故等,具有重大的应用意义。
为了设备稳定安全运行,提高工作效率,减少人工巡查疲劳。需要对张集、谢桥、潘集高压配电室安装轨道式巡检机器人。安装3套智能轨道巡检机器人。用于全面覆盖配电室设备实时状态监测,同时搭载可见光红外摄像机,用于监测设备温度实时状态。机柜为对向两排分布 ,计划在机柜中间布置一条直线型轨道(如下图) ,轨道长度(具体根据现场实测长度),共3条。在顶上吊装支架进行轨道的吊装拼接,轨道安装在支架下方,机器人可通过轨道进行来回巡检,挂载的摄像头实时录像。
自动巡检:自动巡检指巡检机器人能够按照预设规划路径、巡检内容进行自动巡检,自动巡检的模式主要有:手动巡检、定时巡检等,各种模式支持互相切换。机器人搭载高清摄像机、红外热成像仪、等检测设备,按照既定的规则完成各处的设备进行可见光图像采集、红外测温巡检活动,并将巡检数据实时传输到后台管理系统中进行存储、展示。
人工遥控巡检:除机器人自动巡检外,运维人员还可以通过人工手动的方式控制机器人进行巡检。该应用模式适用于运维人员以及管理单位需要对某类设备的状态进行锁定与监测,尤其对于在设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间使用后台系统界面的预置点位面板,操控机器人快速到达异常设备位置,及时对异常设备进行查看并核实报警信息,以便迅速制定处理策略。
机器自检:机器人自检包括机器人本体在开机时的自检和机器人在巡检过程中的实时自检。机器人在每次开机过程中均会进行自检,若发现部件异常,则给出异常指示,方便运维人员及时发现机器人故障,减少处理时间,提高解决故障的效率。
巡检定位:挂轨机器人沿轨道行驶,通过码盘进行测距和定位,同时通过在轨道上预先设置预置点位进行定位巡检。通过齿轮齿条进行校准,实现精确定点停靠。无需在轨道上安装定位标签,避免时间长标签损坏导致定位不准。预置位保存在主板内部,自动根据设定点位进行路线巡检。定位误差不超过±3mm.
数据报表:后台管理系统能够自动存储前端摄像机拍摄到的图片以及预设巡检点数据的查询,并生成相关报表。记录准确且完整,方便存储、汇报、决策和作归档处理等。
视频巡检:根据设备巡视内容及要求,对厂区巡检点位巡视进行梳理,形成覆盖要求。根据现场实际情况,通过配置红外高清双视在线测温系统、高清摄像机等设备,实现机器人巡检。机器人配备可见光摄像机、红外热成像仪等检测设备,并能将所采集的视频上传至监控后台。巡检内容可包含:现场人员情况以及配电室设备的外观设备。
通过搭载热成像测温功能热成像摄像头具有1个 RJ45网络接口、2路报警输入、2路报警输出、1路音频输入、1路音频输出、1个BNC模拟视频输出接口、1个HDCVI 输出接口、1个RS485接口。样机采用DC12V适配器供电。云台定位准确度检验:≤0.01°动态范围检验:可见光视频:≥90dB,信噪比检验:可见光视频:≥62dB,最低照度检验:移动侦测功能检验:当可见光视频图像设定的侦测区域内有目标移动时,可在客户端给出报警提示、联动报警输出并发送email、联动录像及联动抓拍。
随着智能化工业的迅速发展,将机器人技术应用与设备故障检测融合,通过巡检机器人实现对电力、煤矿制造等场景的无人化运维检测,这已经成为必然的发展趋势。巡检机器人可以实现高频次、大范围、无遗漏的执行巡检任务,避免常规人工巡检可能出现的人员疲劳效率低、误操作导致安全事故等,具有重大的应用意义。
- 热门文章



